|
With their flexibility and dexterity, starfish and other echinoderms have long intrigued robotics researchers. But replicating the functionalities of these unique sea creatures is no simple endeavor.
“Their appendages twist and bend in ways that are difficult to model,” explains Derek Paley, director of the Maryland Robotics Center and a professor in the aerospace engineering department and the Institute for Systems Research. “To design similar appendages, we not only have to recreate their texture, but be able to simulate the way they move and respond to environmental stimuli. It’s a complex engineering task—and a programming challenge as well, requiring high levels of computational power.”
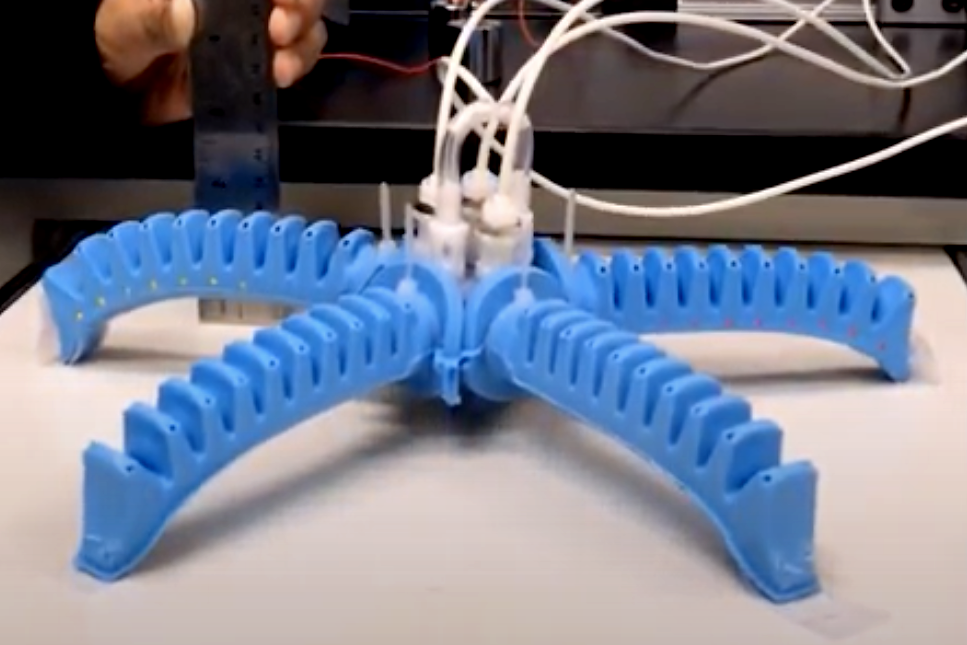
 Over the past three years, Paley has been the principal investigator on a project aiming to create soft underwater robot appendages that mimic the behavior of sea stars, brittle stars, and basket stars, collectively known as radially symmetrical echinoderms. Paley’s colleagues on the project are UMD aerospace engineering chair Norman Wereley; Carmel Majidi, an associate professor at Carnegie Mellon University; James Weaver, senior research scientist at Harvard University; and Professor Robert Wood, also of Harvard University. Over the past three years, Paley has been the principal investigator on a project aiming to create soft underwater robot appendages that mimic the behavior of sea stars, brittle stars, and basket stars, collectively known as radially symmetrical echinoderms. Paley’s colleagues on the project are UMD aerospace engineering chair Norman Wereley; Carmel Majidi, an associate professor at Carnegie Mellon University; James Weaver, senior research scientist at Harvard University; and Professor Robert Wood, also of Harvard University.
Their work, funded by the Office of Naval Research’s Basic Challenge Program, has resulted in prototypes—and plans for further development.
“Right now, the appendages we’ve built can bend in a single plane, but we want them eventually to be able to twist and bend in multiple planes,” Paley said. “We’re aiming to develop the sensor and actuator network further so that the appendages can respond to stimuli and function with a minimum of human control. And we’d ultimately like to be able to use 3-D printing in place of the current molding and dipping process, which is both costly and laborious.”
“The ‘holy grail’ would be if we can send the design over to Terrapin Works or a similar makerspace and have them 3-D print a starfish-inspired robotic appendage,” Paley said.
Beyond the cool factor, such creations would have numerous practical applications. In the not-too-distant future, underwater robots of the kind being developed by Paley’s team could be used to secure ports and harbors, perform ocean cleanup, assist the military in mine disposal, or perform any number of underwater tasks that are perilous for humans.
Longer-term, Paley envisages robotic starfish operating in groups, creating sensor networks that could be used to explore inaccessible parts of the ocean. With further advances in machine learning and autonomy, the robots would be able to carry out tasks with a minimum of human intervention; moreover, because their intelligence would be distributed across a network, an individual robot could fail or malfunction without compromising the system as a whole.
Seastar-inspired robots are only of Paley’s avenues of exploration in what is commonly known as soft robotics; he is also, for example, working to design and program robotic fish—capable of flapping their tails, moving in circles, and propelling themselves in a way similar to their non-robotic counterparts.
“We tend to think of robots as having hard, metallic exteriors, but that’s increasingly not the case,” Paley said. “There are immense advantages to more flexible, pliant structures.”
“The time will come when we don’t refer to this line of research as ‘soft robotics.’ It will just be robotics,” he said.
Related Articles:
MRC and MAGE Earn ARM Institute Endorsement
Robot-Assisted Triage: UMD Team Answers the Challenge
Developing Efficient Systems for Deep Sea Exploration
Inspired by Nature, Researchers Improve System Movement
Diving Deeper into Competition, and Recruitment
UMD-led Team Selected for DARPA Triage Challenge
CSRankings places Maryland robotics at #10 in the U.S.
Department Welcomes New Faculty Member John Martin
UMD Student Team Lauded for Award-Winning Drone
An Internship with Impact
June 4, 2020
|