|
 |
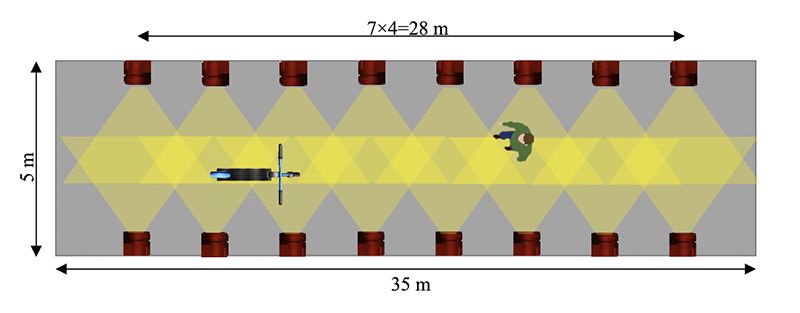
Fig. 8 from the paper. An experiment where a pedestrian interacts with an electric scooter. The graphic also illustrates area dimensions and arrangement of motion capture cameras. |
|
In recent years, “micro-mobility” transportation options like dockless bicycles, electric scooters, autonomous delivery robots, and other novel personal mobility vehicles have become very popular. At the same time, their increasing ubiquity has raised safety concerns for both their users and the pedestrians they interact with in shared environments. Developing new safety strategies and tools for these vehicles has attracted a lot of attention.
Now a University of Maryland alum, his Ph.D. student, and two current UMD faculty members have developed a modified social force model that can predict the interactions of a pedestrian crowd with an electric scooter. Dynamic Modeling and Simulation of Electric Scooter Interactions With a Pedestrian Crowd Using a Social Force Model is being published in IEEE Transactions on Intelligent Transportation Systems (early access Feb. 17, 2022).
The paper was written by ISR alum Yen-Chen Liu (ME Ph.D. 2012), now a mechanical engineering professor at National Cheng Kung University in Taiwan; his Ph.D. student Alireza Jafari; Professor Derek Paley (AE/ISR), and Professor Jae Kun Shim (Kinesiology). As a student at Maryland, Liu was advised by ISR-affiliated Professor Nikhil Chopra (ME).
Micro-mobility vehicles are changing the dynamics of urban commuting, often in very helpful ways. They can increase public transit usage by connecting the “last mile” between a person’s home or office with the public transit systems used in the bulk of a commute. These vehicles also are environmentally friendly and help to reduce traf?c congestion.
However, the growing number of these vehicles—and their frequent use in bike lanes and on sidewalks—has raised safety and comfort concerns for both pedestrians and riders. Urban planners are looking for solutions like better road designs or more appropriate speed limits. Modeling and simulation can help policymakers in this regard, but for these kinds of tools to be helpful, a better understanding of electric scooter interactions with pedestrians is needed. This paper proposes a novel social-force model for electric-scooter rider behavior in shared urban spaces.
Previous studies have generally used a social force model as the main tool to predict pedestrian movements. However, these models are not as useful when wheeled vehicles such as electrical scooters are involved. The new study modifies a social force model with new considerations of a scooter's kinematic constraints and geometry as well as the velocity-dependent behaviors of its rider.
The researchers' new Scooter Social Force Model (SSFM) has three advantages over existing social force models. First, the SSFM considers that the kinematics of e-scooter wheels are subject to nonholonomic constraints and their dynamics depend on the rider behavior and scooter type. Second, the SSFM models the personal space of e-scooters as an ellipse instead of a circle, properly representing its orientation changes. Third, the researchers’ velocity-dependent modi?cation of the existing social force model describes how rider behavior depends on the scooter’s velocity relative to the pedestrians.
The authors’ experiments show their new SSFM performs with a higher prediction accuracy. The paper also includes Monte Carlo simulations that provide insights for urban planners about how the width of travel lanes, pedestrian density, and the e-scooter rider's desired velocity affect pedestrians’ actual and perceived safety.
The SSFM is compatible with available software used for pedestrian movement modeling and can be integrated into existing crowd behavior analysis and platforms. It can generate complex behaviors such as when a scooter rider travels through a group of pedestrians or engages in overtaking pedestrians. In addition, riders’ behavioral differences are captured in model parameters, opening a new line of research on the topic.
The work was supported by a Maryland Transportation Institute seed grant and by the Ministry of Science and Technology (MOST), Taiwan.
Related Articles:
Celebrating Women’s History Month & Multiracial Heritage Month 2026
UMD Alum Named Next Director of Johns Hopkins University Applied Physics Lab
Alum Recognized with 2025 AIAA Missile Systems Award
Driven by Purpose: Sylvie DeLaHunt Honored for Leadership in Diversity and STEM Advocacy
Alum Appointed Space Domain Lead for AIAA
Alum Named Distinguished Professor of Aerospace Engineering at PennState
Alumna Rose Weinstein Receives NASA Early Career Achievement Medal
Celebrating Hispanic/Latinx Aerospace Engineers: Oliver Ortiz
Aerospace Engineering Inducts Class of 2023 Academy of Distinguished Alumni Members
UMD Alumnus Selected as Vertical Flight Society’s New Executive Director
February 23, 2022
|
